Приводы с многопоршневыми двигателями
Приводы с многопоршневыми двигателями
Многопоршневые двигатели могут быть линейные и поворотные.
Линейный дискретный разомкнутый электрогидравлический привод, показанный на рис.5.4, выполнен на базе шагового двигателя с цифровым шагом. Он представляет собой цилиндр 2 с набором свободно плавающих поршней 1, взаимосвязанных ограничителями хода 4 и несколькими трѐхлинейными двухпозиционными распределителями с управлением от электромагнита и пружиной возврата.
Выходным звеном является шток 3, с которым связан только один поршень. В штоковую полость, эффективная площадь которой меньше эффективной площади в бесштоковой полости, постоянно подводится давление, в результате чего при отсутствии сопротивления со стороны бесштоковой полости осуществляется перемещение штока в крайнее левое положение и сжатие пакета поршней. Свободно плавающие поршни образуют три замкнутые камеры, которые распределителями (Р1, Р2, Р3, Р4) с электромагнитным управлением соединяются либо с линией нагнетания, либо слива. При подаче давления в одну из камер поршни, ограничивающие еѐ с двух сторон, раздвигаются на величину, обусловленную ограничителями хода.
Выходной шток перемещается вправо, поскольку тяговая сила, возникающая в камере, вдвое превосходит силу, создаваемую в левой штоковой полости, если эффективная площадь штоковой полости в два раза меньше площади с ограничителями хода. Ограничители хода выбраны таким образом, что каждый поршень может перемещаться на величину, отличающуюся от перемещения соседнего поршня, т.е. L2 2L1, L3 3L1. Выходной шток, который связан с последним поршнем, суммирует приращения перемещений каждого поршня. Комбинируя переключениями камер, можно получить восемь различных положений выходного штока с дискретностью в одну
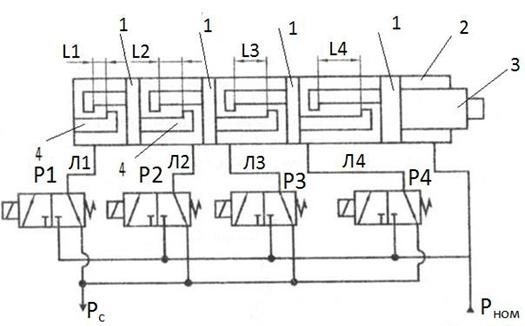
Рис.5.4. Привод с многопоршневыми объѐмными двигателями
Ошибка позиционирования Y зависит от точности изготовления деталей замковых устройств, не зависит от сжимаемости рабочей среды и утечек. Обычно она составляет Y 0.05...0,2 мм .
Недостаток схемы – в некоторых случаях возникает неуправляемое движение выходного звена в период переключения двигателя из одной позиции в другую. Поскольку объѐм рабочих камер между поршнями разный, то заполняются и опорожняются камеры неодинаковое время. Кроме того, значительные габаритные размеры гидродвигателя и сложность конструкции также нежелательны.
Для уменьшения ударов при соприкосновении поршней необходимо применять дополнительный поршень с ходом равным шагу y шаг. При больших скоростях срабатывания для повышения надѐжности вводятся различные демпфирующие устройства.
При увеличении мощности привода его габариты и масса становятся недопустимо большими. В этом случае становится целесообразно применить двухкаскадную схему построения привода. Одна из возможных схем пневматического привода приведена на рис. 5.5.
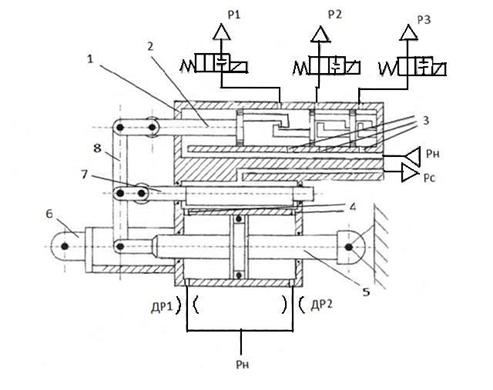
Рис.5.5 . Принципиальная схема двухкаскадного привода
В этой схеме дискретный исполнительный механизм 2 является управляющим для силового привода 5. Схема работает следующим образом. Рабочая среда под номинальным давлением через постоянные дроссели ДР1 и ДР2 поступает в обе полости силового гидродвигателя поступательного движения 5. При смещении заслонки
7, например, влево один из переменных дросселей 4 уменьшает свое проходное сечение, а другой увеличивает. В результате рабочая среда из правой полости силового цилиндра сливается.
Рис.5.6. Многоканальный гидродвигатель
Ширина пояска поршня цилиндра равна диаметру отверстий. Число позиций двигателя соответствует числу отверстий. Рабочее давление подводится в обе полости цилиндра через постоянные
дроссели. Направление и величина перемещения поршня гидроцилиндра зависят от того, какое отверстие соединено посредством распределителя с баком. Уменьшение давления в одной из полостей цилиндра не передается в противоположную полость благодаря дросселям ДР1 и ДР2. Однако дроссели уменьшают быстродействие позиционного гидропривода и вызывают потери энергии.
Перемещаясь, поршень постепенно перекрывает сливное отверстие, тем самым уменьшая площадь проходного сечения, что притормаживает поршень в конце хода.
5.5.Шаговые гидродвигатели
У шаговых гидродвигателей с механической редукцией шага силовая функция осуществляется механической силовой передачей. На рис. 5.7 поршни 1 расположены в блоке цилиндров 2. Если гидролинию Л1 посредством распределителя Р1 во второй позиции соединить с рабочим давлением, и одновременно гидролинии Л2 и Л3 будут соединены со сливным давлением, то поршень начнет перемещаться вниз, действуя на «пилу» 3. Поршень 1 перемещается до тех пор, пока не окажется во впадине 3.
Схема радиально-поршневого шагового гидродвигателя с роликокулачковым передаточным механизмом показана на рис. 5.8.
Здесь имеются пять поршней 4 с роликами 5, которые посредством гидролиний Л1…Л5 последовательно соединяются с напорной или сливной гидролиниями. Причем только одна гидролиния соединяется с напорным давлением, а остальные гидролинии соединяются со сливом через распределительную ось 1, при этом ротор 2
.
Конструкция этой передачи основана на реализации эффекта преобразования колебательного движения плунжера в дискретное вращение выходного вала шагового гидродвигателя.
Рис.5.8. Схема радиально-поршневого шагового двигателя
Шаговый гидродвигатель представляет собой конструкцию аксиально-плунжерного двигателя вращательного движения. Конструктивно он отличается от обычной аксиально-плунжерной машины тем, что не имеет внутреннего узла распределения рабочей среды, а вместо наклонной шайбы применяется ротор, на торцевой поверхности которого расположен ряд кулачков. Применение их вместо одной наклонной шайбы позволяет за счет изменения угла подъѐма профиля кулачков ротора увеличить при прочих равных условиях крутящий момент на выходном валу двигателя. Каждый в отдельности из этих кулачков выполняет роль наклонной шайбы обычной плунжерной машины.
В корпусе 2 шагового двигателя, показанного на рис.5.9, смонтирован на подшипниках качения приводной вал 1, на котором закреплен ротор 3, имеющий с торца кулачки, взаимодействующие с толкателями 4. Ротор 3 в развертке представляет собой зубчатую гребенку, толкатели 4 смещены один относительно другого на одну треть шага гребенки. Толкатели свободно перемещаются в расточках статора 5. Они представляют собой плунжеры с зубом на конце.
Статор прижимается к корпусу 2 крышкой 6, в которой имеются отверстия под штуцеры гидролиний.
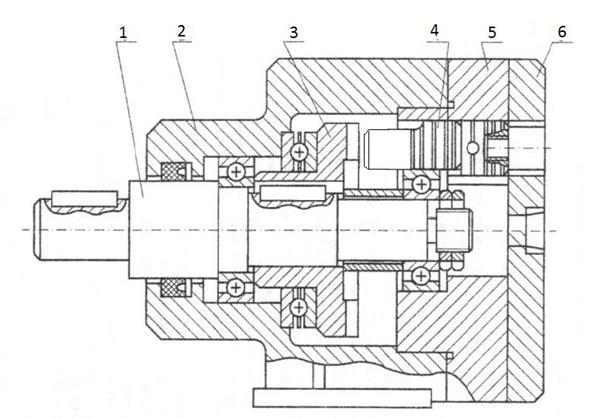
Рис.5.9. Гидравлический шаговый двигатель вращательного движения
Под воздействием гидравлического импульса толкатель перемещается, взаимодействуя со скосом кулачка ротора, поворачивая последний на определенный угол.
Особенностью двигателя является то, что при отсутствии перемещения ротор жестко фиксируется толкателями во впадинах между кулачками, чем обеспечивается самоторможение системы.
Направление вращения двигателя в ту или другую сторону определяется выбранным порядком действия гидравлических импульсов.
Генератор гидравлических импульсов, показанный на рис. 5.10, включает в себя вращающуюся золотниковую втулку со сквозными рабочими щелями.
Генератор имеет три рабочие полости «А», «Б», «В», показанные на рис. 5.11. Полости соединены с гидравлическим шаговым двигателем с помощью гидролиний.
Рис.5.10. Генератор гидравлических импульсов
Вал генератора 3 (см. рис.5.10), жестко закреплѐнный с золотниковой втулкой, приводится во вращение гидромотором (на рисунке не показан). Масло от насоса поступает в полость «Н» (см. рис.5.11) и через рабочую щель во вращающейся золотниковой втулке в соответствующую рабочую полость «А», «Б», «В». Одновременно одна из рабочих полостей соединяется с полостью напора, а две другие с полостями слива. Расход рабочей среды через рабочие щели вращающегося золотника генератора гидравлических импульсов преобразуется в определенную последовательность гидравлических импульсов, каждому из которых соответствует определенный угол поворота выходного вала шагового гидродвигателя.
Для смещения ротора относительно статора необходимо, чтобы гидравлические импульсы поступали к толкателям в определенном порядке.
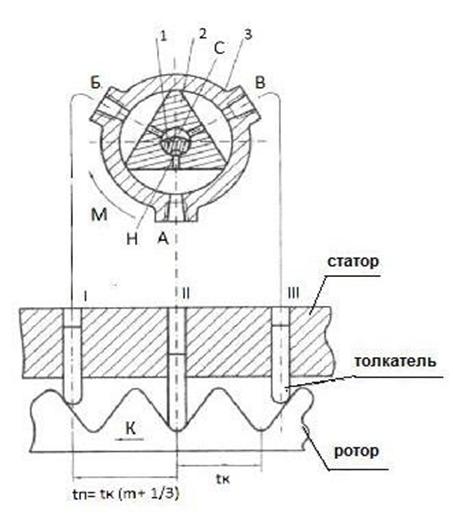
Рис.5.11. Принципиальная схема соединения генератора импульсов с гидравлическим шаговым двигателем
Для осуществления движения ротора по стрелке «К» импульсы должны подаваться в порядке II,I,III, для этого золотниковая втулка генератора гидравлических импульсов 1 (см.рис.5.10) должна вращаться по стрелке «М». При движении ротора в направлении против стрелки «К» вращение генератора должно происходить также против стрелки «М».
Скорость выходного вала шагового гидродвигателя определяется частотой подачи гидравлических импульсов. Наличие объѐмных потерь в гидравлической системе не изменяет передаточного отношения между шаговым гидродвигателем и генератором гидравлических импульсов.
Аксиально-поршневой шаговый двигатель с планетарнозубчатым передаточным механизмом, показанный на рис. 5.12, осуществляет шаговое перемещение выходного вала 5 при поочередном последовательном включении распределителей Р1…Р5 и соединении поршневых камер в блоке цилиндров 1 с напорной и сливной гидролиниями [11]. Наличие планетарно-зубчатого механизма обеспечивает достаточно малый угловой шаг шаг z где передаточное число планетарного редуктора i р; числа зубьев на торцевом зубчатом венце вращающегося ротора 4 и качающемся планетарном зубчатом колесе 3 z р и z п . Качающееся планетарное зубчатое колесо 3 через силовой кардан 6 опирается на неподвижную ось 7.
К недостаткам планетарно-зубчатого механизма относится повышенный износ зубьев при значительных передаваемых крутящих моментах.
Рис. 5.12. Схема аксиально-поршневого шагового двигателя с плунжернозубчатым механизмом
Четыре значения величины шага можно получить четырѐхшаговым гидродвигателем, показанным на рис.5.13. В корпусе 7 неподвижно закреплѐн статор 2. Приводной вал 1 установлен на подшипниках в корпусе 7. Между ротором 8 и закрепленным статором 2 в корпусе установлен поворотный барабан 4 с плунжерами 5. Одна группа плунжеров взаимодействует с зубцами закрепленного статора 2, а другая группа плунжеров – с зубцами ротора 8. Полость каждого плунжера соединена внутренним каналом с наружной кольцевой канавкой поворотного барабана. В корпусе выполнены отверстия для подвода давления в канавки. Количество подводящих отверстий и кольцевых канавок равно количеству плунжеров.
Гидравлический шаговый двигатель работает следующим образом. Рабочая среда от распределителя управления поступает в полости плунжеров «а» и «А», показанные на рис. 5.14. При подаче гидравлических импульсов в порядке «а», «б», «в» поворотный барабан 2 отрабатывает относительно закреплѐнного статора 1 серию шагов в направлении стрелки «К», величиной рав
|
го статора.
Рис. 5.13. Четырѐхшаговый гидродвигатель
Если гидравлические импульсы подавать в каналы по порядку
«А», «Б», «В», то ротор 3 отрабатывает в том же направлении относительно поворотного барабана 4 серию шагов величиной
При подаче рабочей среды в полости плунжеров с последовательностью «аА», «бБ», «вВ» осуществляется прерывистое вращение ротора 3 с шагом t 3 t1 t 2 . Изменение последовательности импульсов на «аА», «вВ», «бБ» приводит к реверсу ротора.
Одновременная подача рабочей среды в полости плунжеров серией «а», «б», «в» и «А», «Б», «В» вызывает отработку поворотным барабаном относительно закреплѐнного статора 2 шага t1 и одновременную отработку ротором 3 шага t 2 в противоположном на правлении. Следовательно, относительно закреплѐнного статора 2 ротор отрабатывает разностный шаг, равный t 4 t1 t 2 . Прерывистое вращение ротора 3 с таким шагом возможно при последовательной подаче рабочей среды «аА», «вБ», «бВ».
Рис.5.14. Схема работы четырѐхшагового гидродвигателя
При сохранении давления рабочей среды в полости одного из плунжеров, например «А», поворотный барабан 2 оказывается жестко связанным с ротором 3. В этом случае последовательная подача рабочей среды в полости плунжеров «а», «б», «в» вызывает прерывистое вращение ротора 3 с шагом
При последовательноСохранение давления рабочей среды в полости одного из плунжеров, взаимодействующих с закреплѐнным статором, например
«а», обеспечивает жесткую связь поворотного барабана 2 со статором 1.
Гидравлическая система управления реализована в виде вращающейся золотниковой втулки с рабочими щелями, на периферии конструктивно наиболее проста. Площади щелей во время поворота не одинаковые. Для избежания удара плунжеров при ходе подача рабочей среды осуществляется по определенному закону. Напорные и сливные щели не равны и должны быть рассчитаны заранее, а их профиль прожигается специальным инструментом.
Струйные шаговые двигатели вращательного, рис.5.15, и поступательного, рис.5.16, движения имеют одинаковый принцип действия.
Для поворота на один шаг, например, влево переключаем распределитель Р2 во вторую позицию и гидролиния Л2 соединяется с напором. При этом две другие гидролинии Л1 и Л3 соединены со сливом. Струя рабочей среды, вытекающая из сопла 1 (см.рис.5.15), расположенного в статоре 2 воздействуя на боковую поверхность зубца, образует крутящий момент, который поворачивает ротор 3 и выходное звено 5, т.е. происходит поворот на один шаг y шаг. Когда ось впадины, расположенной в роторе 3, совпадет с осью струи, движение ротора прекратится. Шаг зубцов зуб , расположенных на роторе 3, соответствует
Струйный шаговый гидродвигатель поступательного движения работает следующим образом. При переключении распределителя Р1 во вторую позицию верхние сопла подключаются к напорному давлению. Струя рабочей среды, вытекая из сопла, давит на боковую поверхность зубца, и поршень перемещается влево. Угол наклона профиля впадины зубьев не симметричный. Хотя подключаются одновременно два сопла, но тяговую силу создает струя лишь одного из них. Для перемещения вправо выходного звена необходимо подключить напорное давление рабочей среды к нижним соплам. Осевые размеры несимметричных профилей впадины зубьев рекомендуется выбирать равными.
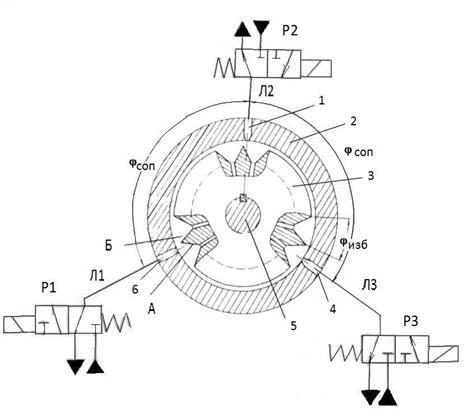
Рис.5.15. Трѐхтактный радиально-струйный шаговый гидродвигатель вращательного движения: 1,4,6сопла; 2статор; 3ротор;5выходное звено
Шаговый гидродвигатель с храповым механизмом показан на рис.5.17. Он состоит из двух цилиндров одностороннего действия 1 и 5, внутри поршней которых закреплен храповой механизм в виде собачек 2, 4. Зубчатое колесо 3 соединено с выходным валом 6. При переключении распределителя Р2 во вторую позицию поршень
5 перемещается влево и собачка храпового механизма поворачивает зубчатое колесо по часовой стрелке. При этом верхний гидроцилиндр 1 должен быть соединен со сливом, т.е. распределитель Р1 находится в первой позиции. В исходное положение поршни приводятся пружиной, когда распределители соединяют цилиндры со сливом.
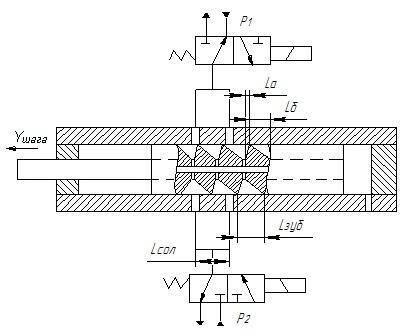
Рис. 5.16. Струйный шаговый гидродвигатель поступательного движения
Рис. 5.17. Шаговый гидродвигатель с храповым механизмом: 1поршень верхнего цилиндра одностороннего днйствия; 2,4собачки храпового механизма; 3зубчатое колесо; 5нижний цилиндр; 6выходной вал
Пружинный фиксатор удерживает зубчатое колесо от поворота под воздействием нагрузки при отсутствии давления в рабочих камерах цилиндров.
5.6. Вопросы для самоконтроля к главе 5
1. Назовите разновидности и области применения объѐмных приводов дискретного действия.
2. Какие факторы влияют на точность позиционирования объѐмных приводов с дозатором и многопоршневым двигателем?
3. Какова структура гидроприводов с шаговыми двигателями?
4. Каковы особенности проектирования дозаторного гидропривода?
5. От каких факторов зависит ошибка позиционирования дискретных приводов?
6. Что вызывает потери энергии и уменьшение быстродействия у многоканальных дискретных гидродвигателей?
7. В чѐм состоят преимущества и недостатки шаговых двигателей с механической и гидравлической редукцией шага?
8. Каковы принцип действия и конструктивные особенности струйных шаговых двигателей?
Литература
1. Аверьянов, О.И. Модульный принцип построения станков с
ЧПУ/ О.И.Аверьянов. М.: Машиностроение, 1987. 232с.
2. Автоматизированное проектирование машиностроительного гидропривода; под ред.С.А. Ермакова. М.:Машиностроение,
1988. -312с.
3. Амиров, Ю.Д. Основы конструирования: Творчество, стандартизация, экономика / Ю.Д. Амиров. М.: Изд-во стандартов,
1991. -392 с.
4. Башта, Т.М. Гидравлические приводы летательных аппаратов /
Т.М. Башта. М.:Машиностроение, 1967. -496с.
5. Бесекерский, В.А. Теория систем автоматического регулирования. Изд. 2-е / В.А. Бесекерский, Е.П. Попов. М.:Наука, 1972. 768с.
6. Бушуев, В.В. Основы конструирования станков / В.В. Бушуев.М.: Станкин, 1992. -520 с.
7. Гидравлика, гидравлические машины и гидравлические приводы / Т.М. Башта, С.С. Руднев, Б.Б. Некрасов и др.; под общ. ред Т.М. Башты. – М.: Машиностроение, 1970. 504с.
8. Домогаров, А.Ю. Справочно-нормативные материалы на рабочие жидкости и смазки / А.Ю. Домогаров [и др.]. М. : МАДИ(ГТУ), 2004. -124с.
9. Конструкции многоцелевых гусеничных и колесных машин : учебник для студ.высш.учеб.заведений/Г.И.Гладов, А.В. Вихров, С.В. Зайцев и др.; под ред.Г.И.Гладова.-М.: Издательский центр «Академия», 2010.400с.
10. Коробочкин, Б.Л. Динамика гидравлических систем станков/
Б.Л. Коробочкин. М.: Машиностроение, 1976.-240с.
11. Лещенко, В.А. Гидравлические следящие приводы станков с программным управлением/ В.А. Лещенко.М.: Машиностроение, 1975. – 288с.
12.Навроцкий, К.Л. Теория и проектирование гидрои пневмоприводов : учебник для студентов по специальности «Гидравлические машины, гидроприводы и гидропневмоавтоматика»/ К.Л. Навроцкий. М.: Машиностроение, 1991. -384с.
13.Навроцкий, К.Л. Шаговый гидропривод/ К.Л. Навроцкий, Т.А.Сырицин, А.И. Степаков.М.:Машиностроение, 1985.-156с.
14.Попов, Д.Н. Гидромеханика/ Д.Н.Попов [и др.] М.: Изд-во
МГТУ им. Н.Э. Баумана, 2002.-382с.
15.Попов, Д.Н. Механика гидрои пневмоприводов/ Д.Н.Попов. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2001.-320с.
16.Попов, Д.Н. Динамика и регулирование гидрои пневмосистем: учебник для вузов по специальностям «Гидропневмоавтоматика и гидропривод» и «Гидравлические машины и средства автоматики». – 2-е изд. перераб. и доп/ Д.Н.Попов. М.: Машиностроение, 1987.-464с.
17. Приводы автоматизированного оборудования: учебник для машиностроительных техникумов / О.Н. Трифонов, В.И. Иванов, Г.О. Трифонова.-М.: Машиностроение, 1991.-336с.: ил.
18.Сервоприводы и автоматические агрегаты автомобилей/ Л.Л.
Гинцбург, Ю.К. Есеновский-Лашков, Д.Г. Поляк.М. : Изд-во
«Транспорт», 1968.-192с.
19.Следящие приводы. В 2-х кн.; под ред. Б.К.Чемоданова. М. : Энергия, 1976.
20.Трифонов, О.Н. Автоматизированные системы приводов технологического оборудования/ О.Н. Трифонов, В.И.Иванов, Г.О. Трифонова – М.:МГТУ «СТАНКИН», 1998.-119с.
21. Физические величины: справочник; под ред. И.С. Григорьева, Е.З. Мейлихова.М.: Энергоатомиздат, 1991. -232с.
22. Фукс, Г.И. Заводская практика. №12 1955; Сборник «Часовые механизмы. Теория, расчет и материалы»/Г.И. Фукс.-М.: Машгиз,
1955. –186с.
23. Aircraft Flight Control Actuation System Design/ By E.T. Raymond, P.E. with C.C. Chenoweth. Published by: Society of Automotive Engineers, Ins. 400 Commonwealth Drive Warrendale, PA 15096001 USA.
Обсуждение Следящие системы приводов
Комментарии, рецензии и отзывы