Выбор типоразмера насоса
Выбор типоразмера насоса
Насос выбирается по наибольшему расходу насоса н .рас . при давлении. Если номинальное давление меньше
6,3 МПа, то обычно применяют шестеренные насосы. При давлениях выше 10 МПа – аксиальноили радиально-поршневые насосы. Насос выбирают из справочника, и выписывают его типоразмер и технические харктеристики.
Определение крутящего момента на валу насоса
3.4.4. Предохранительный клапан настраивается на давление
pк .пр .
1,1..1,3 pном .
3.6. Динамический расчет следящего гидропривода
Динамические свойства исполнительного механизма зависят от многих нелинейных факторов. Проанализировать, как поведет себя система во время переходного процесса, можно по математической модели следящего привода. Поскольку процессы, проходящие в системе нелинейные, то и модель нелинейная, сложная. Такую модель хорошо применять уже на завершающей стадии проектирования. Для предварительной оценки выбранных параметров силовой части привода достаточно упрощенной линейной математической модели.
Рассмотрим линейную математическую модель для четырехщелевого следящего привода, показанного на рис.3.2.
Уравнение сил, действующих на поршень исполнительного двигателя:
Уравнения расходов в полостях распределителя запишем, принимая втекающую жидкость за положительную величину, а вытекающую из полости распределителя за отрицательную величину:
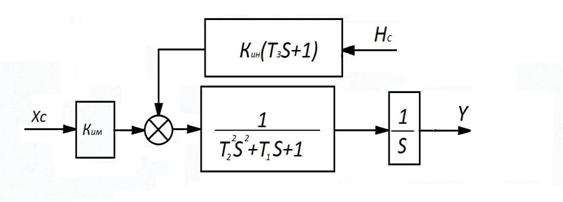
Рис.3.4. Структурная схема линейной математической модели исполнительного
механизма с нагрузочной функцией времени Hc t
Передаточная функция исполнительного механизма следящего привода по нагрузочному воздействию будет
Структурная схема линейной математической модели показана на рис.3.5.
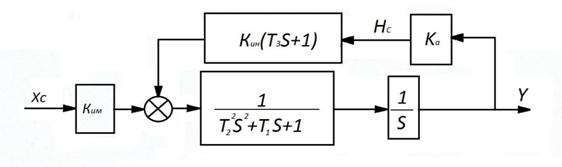
Рис.3.5. Структурная схема линейной математической модели исполнительного механизма с позиционной нагрузкой
Общий результат двух воздействий определяется по принципу суперпозиции Y S
Передаточная функция исполнительного механизма по регулирующему воздействию при позиционной нагрузке H c
По соотношению коэффициентов можно судить о влиянии параметров исполнительного механизма и нагрузки на колебательность привода при переходном процессе. Уравнение, описывающее действие сравнивающего механиз
ма следящего привода с механическим управлением, будет
Дополним этим уравнением, взятым в изображениях Лапласа, линейную математическую систему уравнений, полученную ранее передаточные коэффициенты входного механизма и обратной связи.
Передаточная функция следящего гидропривода с механическим управлением по управляющему воздействию
Передаточная функция следящего гидропривода с механическим управлением по нагрузочному воздействию
Представим эти передаточные функции в стандартной форме с полиномами, введя обозначения
Общая структурная схема линейной математической модели приведена на рис.3.6.
По передаточным функциям можно различными методами оценить поведение системы в динамике. Наиболее полную информацию о динамических свойствах линейной математической модели следящего привода дают расчет и построение переходной функции.
Под переходной функцией подразумевают переходный процесс, т.е. движение выходного звена привода во времени Y вом внешнем воздействии.
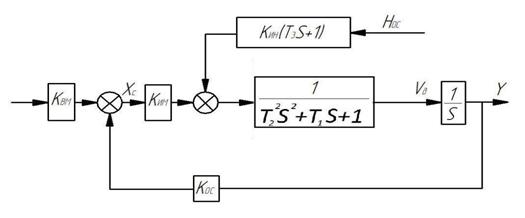
Рис. 3.6. Структурная схема линейной математической модели
Пусть входными воздействиями будут типовые внешние воздействия в виде ступенчатых функций, показанных на рис. 3.7.
Входным сигналом по управляющему воздействию примем функцию X t
В изображениях Лапласа ей соответствует функция X S X 0 . Поскольку передаточная функция по нагру S зочному воздействию отрицательная, для того чтобы график переходного процесса был положительным, примем входной сигнал по нагрузочному воздействию отрицательным Hс t H 0 1 t
S зочному воздействию отрицательная, для того чтобы график переходного процесса был положительным, примем входной сигнал по нагрузочному воздействию отрицательным Hс t H 0 1 t
Внешнее воздействие может быть лишь «малой» величиной, так как математическая модель линеаризованная, поэтому входное воздействие может быть примерно
Изображение искомых функций выглядит следующим образом:
Обычно переходные функции определяют отдельно по управляющему или нагрузочному воздействиям. Когда необходим результат двух этих воздействий, то их суммируют. По полученной функции переходного процесса, рассчитанной с помощью компьютера, строят график. Затем график вручную обрабатывают, определяя величины, характеризующие быстродействие и колебательность системы. Построим переходный процесс, используя стандартную программу Mathcad PLUS .
Все поле экрана в программном комплексе Mathcad является алгоритмом расчета. Поэтому пояснения, написанные на русском языке, необходимо писать только в рамке, чтобы программа не воспринимала это как программу расчета. Для написания русского текста курсор ставится в нужное место, затем выбираются последовательно: Вставка, Text Reqion (текстовая облась), Arial Cyr, 14, и только в высветившейся рамке пишутся комментарии.
Построение переходного процесса приведено только для управляющего воздействия. По возмущающему воздействию можно построить переходный процесс по аналогии.
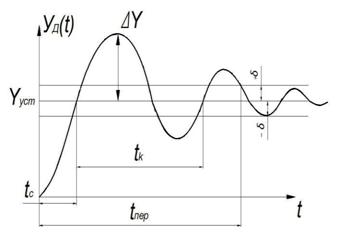
Рис.3.8. График переходного процесса
Предполагаемый вид экранного файла.
Задание № 1
Группа Вариант Фамилия РАСЧЕТ ПЕРЕХОДНОГО ПРОЦЕССА СЛЕДЯЩЕГО ГИДРОПРИВОДА
Исходные данные:
коэффициенты полинома числителя коэффициенты полинома знаменателя
Коэффициенты характеристического полинома в порядке возрастания присваиваем матрице V, состоящей из одного столбца и четырех строк, набираем вручную цифры вместо букв, написанных автором.
Далее набираем команду “polyroots(V)=” и программа Mathcad выдает корни характеристического полинома, например те, что приведены. Согласно теореме Ляпунова, чтобы система была устойчивой, вещественная часть корней характеристического полинома должна быть отрицательной. Если корни получились положительными, нет смысла продолжать построение переходного процесса . При отрицательных корнях по приближенным формулам необходимо определить следующие параметры.
Отрицательная вещественная часть корня ближайшего к мнимой оси.
Расчет переходного процесса операционным методом
Набрать искомую функцию вручную. Поставить курсор к любой букве “S”, войти в строку состояния “Symbolik”, выбрать “Transforms”, далее выбрать “Inverse Laplace Transform”, должна получиться длинная строка по ширине на несколько страниц. Этой командой мы сделали обратное преобразование Лапласа и получили искомую функцию не в изображениях, как изначально задавали, а как функцию реального времени. Эту строку надо скопировать, и присвоить ей “Y(t)”. В данном примере из длинной строки приведено только два первых слагаемых. На самом деле, нужна вся строка полностью. При копировании необходимо убедиться, что строка выделена полностью.
Ранжировка переменных величин
Задаем количество точек расчета n от 0 до 70 точек. Шаг расчета устанавливаем по посчитанной ранее величине. Текущее время расчета каждой точки t n . Обратите внимание, что t с индексом, индекс вызывает в программе специальную функцию для расчета.
График переходного процесса
Для построения графика входим в строку состояния “Вставка”, “График”, “зависимость X-Y” или “X-Y Plot”. Появляется прямоугольник, внизу в окне набираем t n, с левой стороны в окне набираем Y t n, после чего появляется сам график. который затем необходимо вручную обработать после распечатки.
Примерный график переходного процесса показан на рис.3.8. На графике обозначено: Yуст – установившееся значение координаты выходного звена; Y максимальная динамическая ошибка (величина перерегулирования); зона допустимой погрешности или нечувствительности; tc – время срабатывания привода; tк – период собственных колебаний; tпер – время переходного процесса.
Обсуждение Следящие системы приводов
Комментарии, рецензии и отзывы