Шаговые и дискретные приводы
Шаговые и дискретные приводы
5.1. Структура шагового гидропривода
При качественном сравнении следящих и шаговых гидравлических приводов определим области их эффективного использования в технологическом оборудовании. Плавное движение рабочих органов привода по заданной траектории движений с заданной скоростью и остановку в любой точке обслуживаемого пространства гидравлические шаговые приводы обеспечить не могут. Для выполнения этих задач следящие приводы вне конкуренции. Однако функции позиционирования и фиксации рабочих органов машин при ограниченном количесиве координат могут успешно осуществлять не только следящие приводы, но и шаговые гидроприводы. Такие функции выполняют сервоприводы систем дистанционного управления различных гидрофицированных машин, силовые гидроприводы программных систем технологического оборудования и гидроприводы автоматических манипуляторов подъѐмно-транспортного назначения. При этом шаговые гидравлические приводы во многих случаях оказываются технологичнее, дешевле и надѐжнее в эксплуатации, чем следящие приводы, потому что у них меньше дорогостоящих деталей и устройств с повышенной интенсивностью отказов. Шаговые приводы менее чувствительны к колебаниям температуры и чистоте рабочей среды. К тому же они не нуждаются в регулировке и настройке отдельных устройств при эксплуатации привода.
В табл. 5.1 приведены некоторые технические показатели силовых шаговых электродвигателей, шаговых двигателей с гидроусилителями моментов и силовых шаговых гидромоторов [13]. В табл. 5.1 под динамической добротностью понимается отношение максимального развиваемого момента на выходном валу к моменту инерции ротора. Относительная статическая ошибка равна отношению максимальной ошибки позиционирования к величине шага. Удельный весовой показатель определяется делением массы на максимальный крутящий момент. Под показателем энергоѐмкости подразумевается отношение номинальной мощности к габаритному объѐму исполнительной части привода. Применение дискретных устройств позволяет существенно упростить систему управления, получить достаточную точность при разомкнутой системе управления за счет однозначного соответствия между количеством и частотой управляющих импульсов и величиной и частотой отработки дискретных перемещений на выходном звене исполнительного органа. Структурно шаговый гидропривод можно представить в виде трѐх функционально и конструктивно завершенных блоков: источника рабочей среды, управляющего устройства, шагового двигателя,
показанных на рис. 5.1.
Таблица 5.1
| Технические показатели силовых шаговых приводов | Значения показателя | ||
| силового шагового электродвигателя | шагового двигателя с гидроусилителем момента | силового шагового гидромотора | |
| Номинальный крутящий момент, H м | 2,5…25 | 8…65 | 20…150 |
| Величина шага, | 2,65 | 1,5 | 4,5 |
| Частота отработки при номинальной нагрузке, Гц | 130…300 | 800 | 30…80 |
| 1 Динамическая добротность, с 2 | 65…1050 | 4000…11000 | 12000…50000 |
| Относительная динамическая ошибка | 2 | 10…20 | 1 |
| Относительная статическая ошибка | 0,5 | 1,5 | 0,2 |
| Удельный весовой показатель, кг Н м | 0,8…1,2 | 0,6…1,3 | 0,3…0,4 |
| Показатель энергоѐмкости, Вт дм 3 | 14…65 | 10…26 | 110…140 |

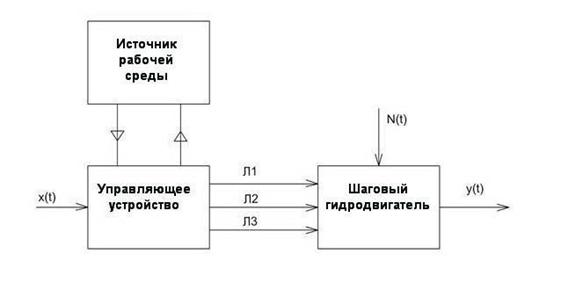
Рис.5.1. Структурная схема шагового гидропривода
Выходное звено шагового гидродвигателя отрабатывает дискретно один шаг при каждом переключении исполнительных гидролиний и удерживается в фиксированном положении при неизменном состоянии исполнительных гидролиний. Управляющие сигналы отрабатываются с высокой точностью, а гидравлический шаговый двигатель обеспечивает большие вращающие моменты или тяговые силы.
Управляющее устройство шагового гидропривода предназначено для осуществления коммутации, т.е. тактового переключения исполнительных гидролиний в соответствии с входными управляющими сигналами. Это переключение исполнительных гидролиний обеспечивает периодическое соединение рабочих полостей гидравлического шагового двигателя с напорным или сливным трубопроводом.
Источником рабочей среды служит насосная установка. Специфика работы шаговых двигателей в резкопеременном расходе рабочей среды в процессе отработки шагов, а также в необходимости поддержания давления жидкости в напорной гидролинии без еѐ значительного расхода в период фиксации (остановки) выходного звена. Для этого часто применяют насосные установки: с регулируемым по давлению насосом; с двумя нерегулируемыми насосами и автоматом разгрузки насоса большей производительности; а также насосно-аккумуляторную установку.
Управляющее устройство содержит преобразователи сигналов и гидравлические распределители, которые обеспечивают переключение гидролиний, обозначенных «Л1», «Л2», «Л3».
Входной сигнал x t по физической природе может быть механическим, гидравлическим, электрическим, пневматическим. По форме входной сигнал бывает импульсным или релейным. Выходным сигналом y t шагового гидропривода может быть линейное или угловое шаговое перемещение звена на величину шага y шаг , преодолевающее внешнюю нагрузку N t .
Управляется шаговый гидродвигатель за счет тактовых переключений гидролиний «Л1», «Л2», «Л3». Количество тактов в цикле обычно находится в диапазоне 2…8. После каждого тактового переключения выходное звено шагового двигателя перемещается на определенную величину равную шагу y шаг. Наиболее распространены шаговые двигатели, перемещающиеся за один шаг в диапазоне y шаг 1,5...22,5 или y шаг 1...100мм .
Обсуждение Следящие системы приводов
Комментарии, рецензии и отзывы