Принцип действия следящих приводов
Принцип действия следящих приводов
Структура следящих приводов
Любая следящая система состоит из следующих элементов: устройства, задающего входной сигнал; сравнивающего устройства; исполнительного механизма; обратной связи. В некоторых системах между исполнительным механизмом и сравнивающим устройством применяют преобразователь сигнала и усилитель сигнала рассогласования.
В качестве задающего устройства могут быть различные программоносители, например, жесткие копиры или шаблоны. В станках с программным управлением задающим устройством может служить программоноситель, записанный на перфоленте, магнитном или лазерном диске с соответствующим преобразователем. Программоноситель преобразует данную программу в сигналы управления движением исполнительного механизма. Выходным сигналом задающего устройства является Хвх (рис. 1.1).
В гидравлических копировальных следящих системах в качестве программоносителя часто используется механический копир, который при движении относительно щупа сообщает ему механическое перемещение в соответствии с профилем или законом изменения входной величины, зафиксированным на копире.
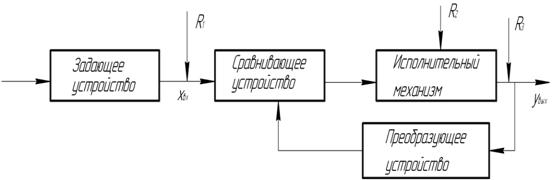
Рис. 1.1. Структура следящей системы
Механическое перемещение щупа передается дросселирующему распределителю, который управляет движением исполнительного механизма.
Перемещение исполнительного механизма является выходным сигналом – Yвых. Выходной сигнал используется для выполнения полезной работы, и одновременно поступает на сравнивающее устройство. Выходной сигнал, идущий на сравнивающее устройство, называется обратной связью. Механическая связь часто бывает с передаточным отношением 1:1 или с любым другим соотношением. Обратная связь может быть в зависимости от системы управления и технических средств еѐ реализации электронной, пневматической, электрической.
Входной и выходной сигналы подаются на сравнивающее устройство. Сравнивать можно только величины, имеющие одну физическую природу, например, перемещение с перемещением, скорость со скоростью, объѐм с объѐмом и т.д. Сравнивающее устройство наиболее важный механизм следящей системы. Любое сравнивающее устройство характеризуется тем, что имеет два входа и один выход одной и той же физической природы. В качестве сравнивающихся величин могут быть как кинематические величины (перемещение, скорость, ускорение), так и силовые (сила, давление и т.д.). В гидравлических следящих системах часто сравниваются перемещения.
Сравнивающее устройство в таких системах состоит из дросселирующего распределителя, где входными величинами являются независимые перемещения затвора и корпуса распределителя, а выходной величиной является ширина дросселирующей щели. Причѐм в сравнивающем устройстве нас интересует не перемещение всего затвора, а лишь кромки затвора и кромки корпуса распределителя.
Часто под обратной связью понимают жестко организованную цепочку элементов связи выходного сигнала системы с входным сигналом, при котором отклонение выходного сигнала вызывает соответствующее изменение входного сигнала объекта. В понятие обратной связи включают не только сравниваемые сигналы, но и сравнивающее устройство.
Обратная связь может быть положительная и отрицательная. Положительная обратная связь – это такая связь выходного сигнала системы с входным сигналом, при котором выходной сигнал только усиливается. Такая связь часто используется в электронике для повышения коэффициента усиления схем.
В следящих системах применяется отрицательная обратная связь. Отрицательная обратная связь – это такая связь выходного сигнала системы с входным сигналом, при которой отклонение выходного сигнала одного знака вызывает изменение входного сигнала противоположного знака.
Со сравнивающего устройства сигнал рассогласования передается обычно усилителю. Усилитель характеризуется тем, что им регулируется энергия, подводимая к исполнительному двигателю. Величина энергии, подводимой к гидравлическому двигателю, определяется величиной проходных щелей дросселирующего распределителя. Усилителем регулируется энергия, подводимая к исполнительному двигателю. Потребляемая энергия определяется величиной площади проходной щели дросселирующего распределителя. В рассматриваемых схемах распределитель выполняет две функции сравнивающего устройства и усилителя.
В следящих системах выходной сигнал заранее не известен. Он может быть случайной величиной, потому что на систему кроме управляющего воздействия, которое задается в соответствии с технологическим процессом, могут влиять и факторы, носящие случайный, трудно предсказуемый характер – возмущающие воздействия. Например, температура окружающего воздуха, колебания напряжения в электросети, изменение силы трения и т.д.
Преимуществом следящих систем является то, что система компенсирует влияние любого возмущающего воздействия, которое вызвало отклонение величины выходного сигнала системы, путѐм изменения через цепь отрицательной обратной связи величины входного сигнала.
Недостатком является то, что после появления отклонения выходного сигнала регулятор должен компенсировать возмущающее воздействие и уменьшить отклонение от заданного значения величины регулируемого параметра – выходного сигнала системы.
Следящие системы разделяются на непрерывные и дискретные. Непрерывные сигналы представляют собой величины, значения которых являются непрерывными функциями времени (сигналы меняются во времени постоянно). У дискретных сигналов значения изменяются через равные промежутки времени.
Рассмотрим принцип действия следящих приводов на примере суппорта копировально-токарного станка, рис.1.2.
Задающим устройством является копир 7. Для обработки детали 3, помимо подачи, управляющей следящим приводом 4, который расположен на поперечном суппорте 10, необходимо перемещать последний для обеспечения продольного движения щупа и копира вдоль оси детали. Продольная подача может быть постоянной величиной. Она осуществляется двигателем, который управляется распределителем 11.
В дальнейшем привод продольной подачи рассматриваться не будет.
Щуп 8, взаимодействуя с копиром, в зависимости от профиля рабочей поверхности копира будет смещать затвор следящего распределителя вдоль его оси, соответственно увеличивая или уменьшая площадь проходной щели, что приведет к смещению суппорта, в результате изменится количество подводимой жидкости.
В зависимости от типа затвора распределителя различают однокоординатные гидравлические следящие системы с одно-, двухи четырехщелевыми дросселирующими распределителями.
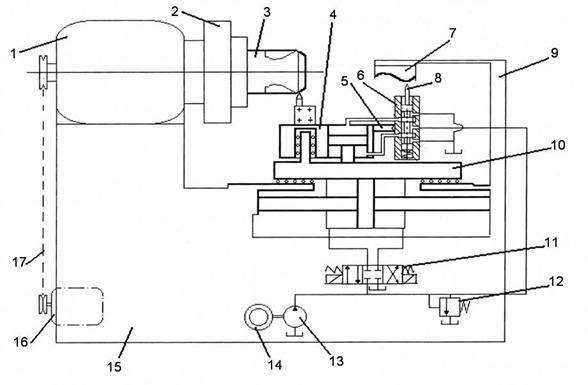
Рис.1.2. Суппорт копировально-токарного станка:
1 – коробка скоростей; 2патрон; 3 – заготовка; 4 – поперечный суппорт с копировальным приводом; 5 – жесткая обратная связь резца со сравнивающим устройством; 6 корпус гидродвигателя и дросселирующего распределителя; 7 – копир; 8 – щуп; 9 кронштейн копира; 10 – продольный суппорт; 11 – распределитель (управляющее устройство продольного суппорта); 12 – предохранительный клапан; 13 – насос; 14 – электрический двигатель насоса; 15 – станина станка; 16 – электродвигатель; 17 – гибкая передача
Обсуждение Следящие системы приводов
Комментарии, рецензии и отзывы